A new article has been published to share my new project with the UM-Dearborn community through M-REPORTER today.
CECS Assistant Professor Jaerock Kwon is working on autonomous vehicles that could assist farmworkers. But building farm AVs presents a much different challenge than ones designed for the road.
Driverless vehicle research on campus recently got a big boost thanks to a National Science Foundation grant. This new Chrysler minivan from Rochester Hills-based Dataspeed is loaded with a full suite of sensors needed for road-legal, fully autonomous driving, including advanced optical cameras and a LIDAR system for creating 360-degree maps of the surrounding environment. Assistant Professor of Electrical and Computer Engineering Jaerock Kwon (far left) and his graduate students (from left) Aws Khalil, Elahe Delavari and Feeza Khan Khanzada are among the researchers who will be using the new AV in their research. (Photo by Max Parham) https://lnkd.in/eNGxBR6K
My project-based learning (PBL) effort for Robotic Manipulation was introduced during the 2024 State of the University Address on Thursday, February 8, 2024.
A project titled “Development of Machine Learning Algorithms for Electric Autonomous Agricultural Vehicles” has been awarded. This project is sponsored by WApplE Cloud Co., Ltd. It will start on January 1, 2024, and end on June 30, 2024.
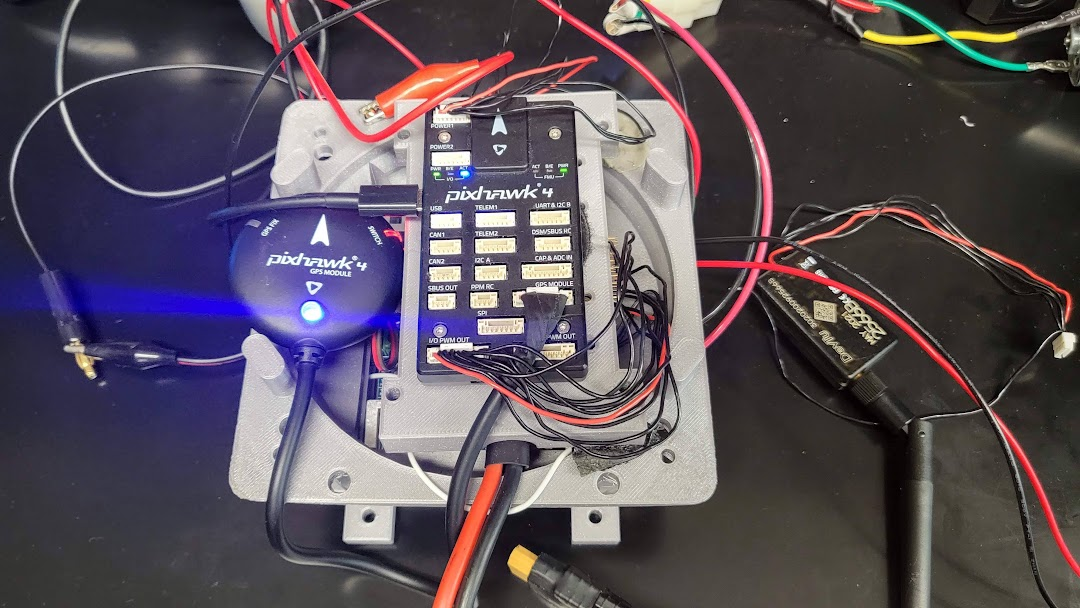
The proposal, “RID: Open-Source Autonomous Ground Vehicular Robotics Platform,” has been awarded for Research Initiation & Development (RID – FY24 Fall Cycle). 1/15/2024 – 1/14/2025.
I am looking for a graduate student who will work on this project during this summer. Please contact me if you are interested in joining this project.
Project Abstract:
The new industry of highly automated mobile robots, including autonomous vehicles, is in high demand for skilled engineers. Engineers for the industry require interdisciplinary knowledge and skillsets, including basic programming skills, electric circuitry, robotic kinematics, machine learning, and Artificial Intelligence (AI). Academia has been trying to respond to the high demand, and there have been efforts to integrate the interdisciplinary knowledge of highly automated intelligent systems, including autonomous vehicles, into their curricula. The integration of the new skillsets or restructuring of the existing curricula is, however, a very challenging task. Some efforts have been made by introducing a small-scale (1/24th, 1/16th, or 1/10th) vehicle to teach the relevant knowledge and skillsets and train researchers and engineers. The MIT RACECAR, F1TENTH, MuSHR, Go-CHART, Dockiebots of Duckietown, and Donkey Car are part of the efforts. A major limitation of the current approaches is in the following two dimensions: (i) The lack of reproducibility owing to heavy craftsmanship requirements due to extensive modifications of the vehicular platform that include removal and replacement of motors, installation of a new ESC (Electronic Speed Controller), custom Printed Circuit Boards, etc. (ii) The restricted onboard processing capabilities due to the platform size (1/24th scale two-wheel or four-wheel differential driving and 1/10th scale Remote Controlled (RC) car). To overcome these major limitations, this project brings forward an innovative idea of building a 1/4th scaled vehicle without extensive modification and providing full-stack software for AI-based perception, planning, and control.
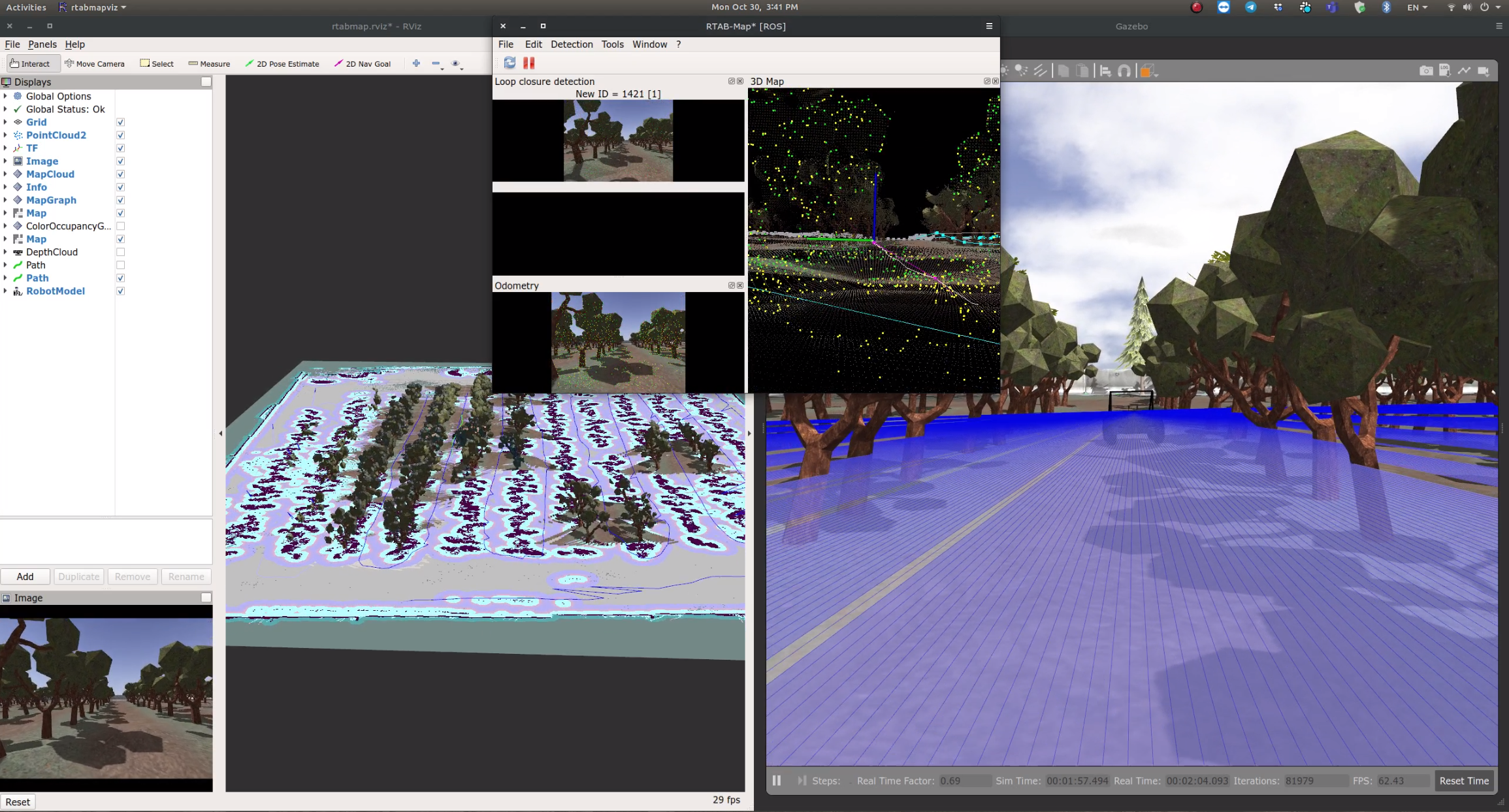
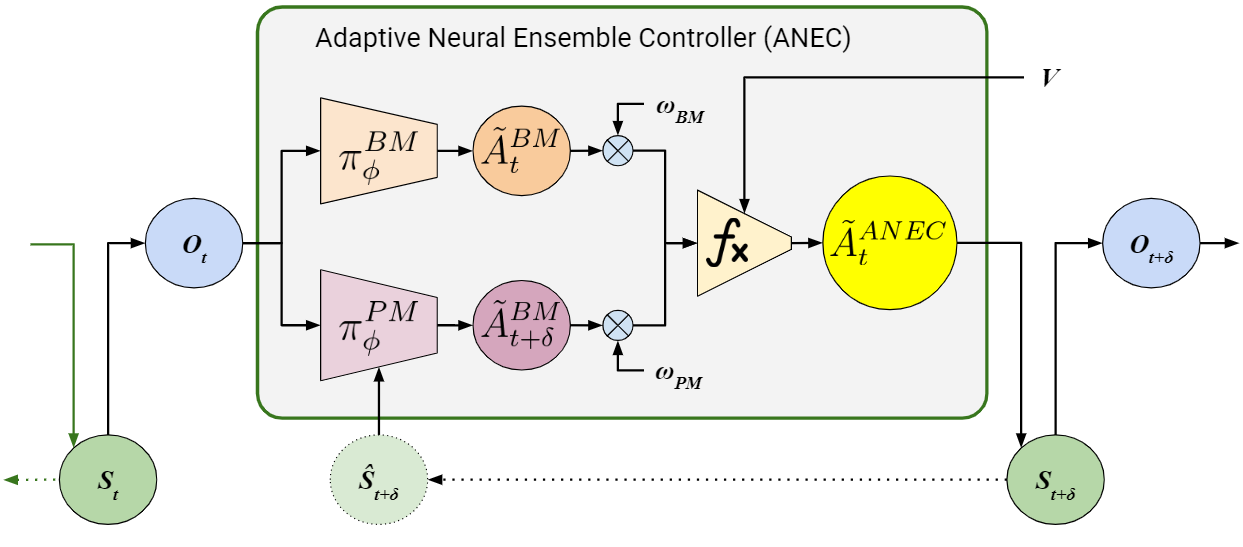
Our work on the adaptive neural ensemble controller has been accepted for the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), which will be held October 1 – 5, 2023, at Huntington Place in Detroit, Michigan, USA. The paper title is “ANEC: Adaptive Neural Ensemble Controller for Mitigating Latency Problems in Vision-based Autonomous Driving.”
This proposal is to acquire an Autonomous Plug-In HYbrid Vehicle research platform (APIHYV) to advance fundamental science and engineering research and education activities by multidisciplinary faculty at the University of Michigan-Dearborn (UM-D). The proposed platform will be crucial research instrumentation to significantly enhance collaborative and interdisciplinary research and education at UM-D in several research activities, including embodied cognitive vehicle, in-vehicular network security, energy consumption, environmental perception, cybersecurity, and driver behavior analyses in electric and advanced mobilities. The instrument will also substantially improve undergraduate and graduate research training in various engineering programs such as electrical, computer, robotics, mechanical, and industrial engineering departments at UM-D located in the Metro Detroit area, in which the General Motors (GM), Ford Motor Company, and Chrysler are headquartered. The proposed instrumentation, the APIHYV consists of (i) a Chrysler Pacifica Plug-in Hybrid, (ii) Drive-By-Wire (DBW) systems, and (iii) a sensor suite (LIDARs, radar, RGB cameras, and Global Navigation Satellite System (GNSS)). The Drive-By-Wire kits with steer, brake, throttle, and shift-by-wire controller modules can programmatically and electronically control the vehicle’s steering, throttle, and brake without the addition of mechanical components. Much research has been done on automotive, robotics, cybersecurity, energy systems, human-vehicle interface at UM-D. Yet, they have not been able to conduct collaborative research in a realistic environment with a full-scale programmable vehicle. Each research group has to work in a simulated or simplified environment so that the proposed methods/algorithms were not be able to be fully validated. The project team proposes ten transformative research topics to be enabled by the request instrumentation. The autonomous plug-in hybrid vehicle research platform requested will substantially improve UM-D’s current capabilities with proposed research activities.