My research approaches to building a truly intelligent autonomous system are introduced in the news.
https://umdearborn.edu/news/have-we-been-thinking-about-autonomous-vehicles-all-wrong




My research approaches to building a truly intelligent autonomous system are introduced in the news.
https://umdearborn.edu/news/have-we-been-thinking-about-autonomous-vehicles-all-wrong
My proposal to acquire an autonomous plug-in hybrid vehicle has been awarded. The project title is “MRI: Acquisition of Autonomous Plug-In Hybrid Vehicle Platform for Multidisciplinary Research and Education at the University of Michigan-Dearborn“ (Award #2214830). The project duration is from Sep 1, 2022, to Aug 31, 2025. The total award amount is $244,610.

The project overview is as follows.
This proposal is to acquire an Autonomous Plug-In HYbrid Vehicle research platform (APIHYV) to advance fundamental science and engineering research and education activities by multidisciplinary faculty at the University of Michigan-Dearborn (UM-D). The proposed platform will be crucial research instrumentation to significantly enhance collaborative and interdisciplinary research and education at UM-D in several research activities, including embodied cognitive vehicle, in-vehicular network security, energy consumption, environmental perception, cybersecurity, and driver behavior analyses in electric and advanced mobilities. The instrument will also substantially improve undergraduate and graduate research training in various engineering programs such as electrical, computer, robotics, mechanical, and industrial engineering departments at UM-D located in the Metro Detroit area, in which the General Motors (GM), Ford Motor Company, and Chrysler are headquartered. The proposed instrumentation, the APIHYV consists of (i) a Chrysler Pacifica Plug-in Hybrid, (ii) Drive-By-Wire (DBW) systems, and (iii) a sensor suite (LIDARs, radar, RGB cameras, and Global Navigation Satellite System (GNSS)). The Drive-By-Wire kits with steer, brake, throttle, and shift-by-wire controller modules can programmatically and electronically control the vehicle’s steering, throttle, and brake without the addition of mechanical components. Much research has been done on automotive, robotics, cybersecurity, energy systems, human-vehicle interface at UM-D. Yet, they have not been able to conduct collaborative research in a realistic environment with a full-scale programmable vehicle. Each research group has to work in a simulated or simplified environment so that the proposed methods/algorithms were not be able to be fully validated. The project team proposes ten transformative research topics to be enabled by the request instrumentation. The autonomous plug-in hybrid vehicle research platform requested will substantially improve UM-D’s current capabilities with proposed research activities.
Thank Drs. Doo Kim and Oran Kwon for inviting me. https://www.seoulrobotics.org/

This TEDx Talk is about “Artificial Intelligence Challenges in Connected Autonomous Vehicles.”
“Incremental End-to-End Learning for Lateral Control in Autonomous Driving” has been accepted for IEEE Access. The paper can be found at https://ieeexplore.ieee.org/document/9737528.
“Comparative Study of Markerless Vision-based Gait Analyses for Person Re-identification” has been accepted for the MDPI Sensors journal. The paper can be found at https://www.mdpi.com/1424-8220/21/24/8208.
A paper, “Ridon Vehicle: Drive-by-Wire System for Scaled VehiclePlatform and Its Application on Behavior Cloning” has been accepted for publication on MDPI Energies, the Special Issue on Autonomous Vehicles Perception and Control.
 2
2 1
1 1
1 1
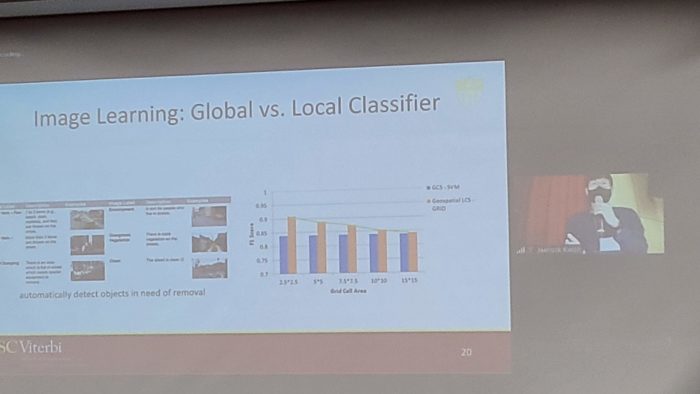
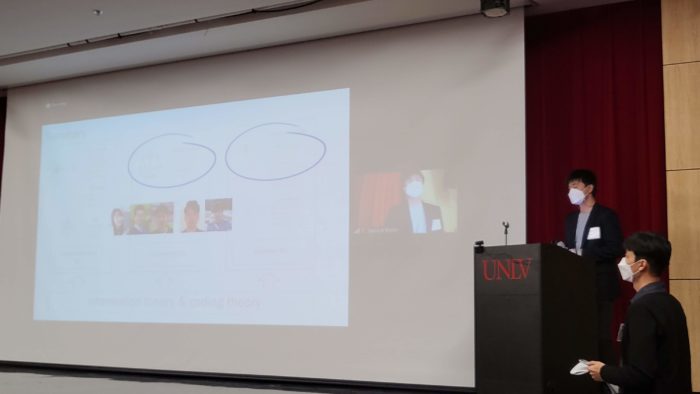
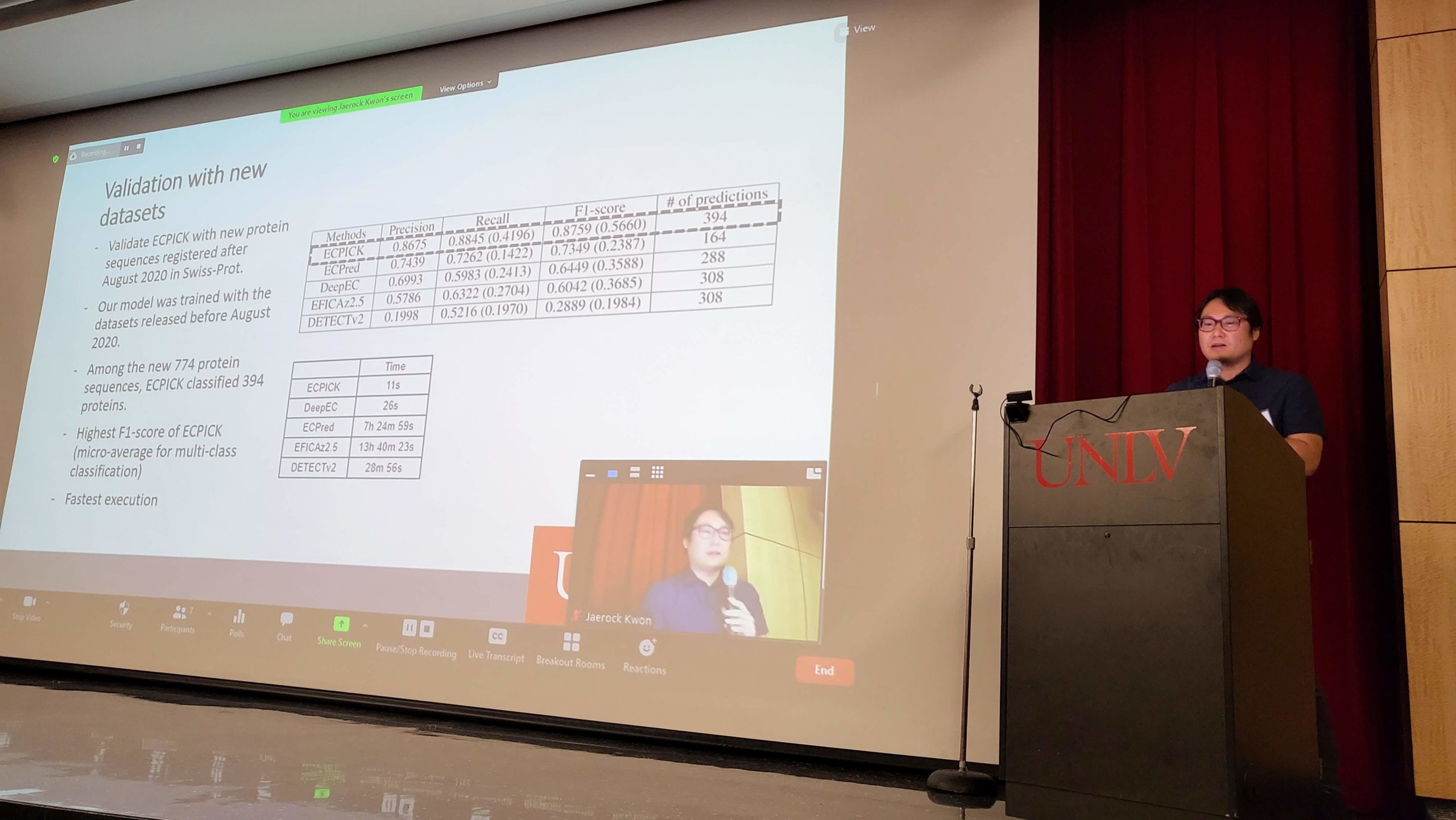
1The 21st KOCSEA Tech Symposium was successfully held on November 6 and 7 at the University of Nevada, Las Vegas. As president of KOCSEA, I am very proud of what we have accomplished.